

全国服务热线
18018737509
全国服务热线
18018737509

电 话:18018737509
电 话:13823726967
邮 箱:527843680@QQ.COM
网 址:https://www.szhlplc.com
地 址:深圳市龙华区观湖街道观城社区环观南路105-13号201-203
plc一般不会直接接伺服电机,而是先接伺服驱动器,由伺服驱动器去控制电机,具体要几根线就要看你的伺服电机和驱动器是什么样的了,这些说明书上都有,上位机是指控制级的上一级,比如由工控机去控制plc,那么工控机就是上位机,有plc控制驱动器那么plc就是上位机
脉冲控制几点说明:
1、:该元件在发出脉冲时被驱动,且有脉冲输出时是动作的。回
2、16位与答32位指令在使用常数K时没什么影响,但在用到寄存器D上时,区别在于占用寄存器的数量上,16位用一个(D0),32位用2个(D1,D2)。
3、SET指令用在步进STLS?时,SET置位到下一步时(如SET),同时会复位本步(如RST)
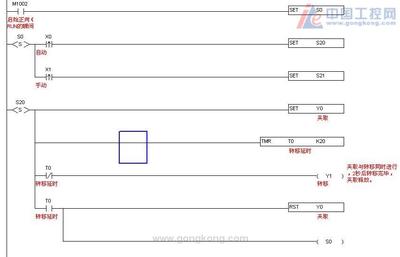
程序分析:
从20步开始时驱动(建议你直接用常开代替);
(NO)→(NC)→M2(NO)→(NC)→输出脉冲本段看起来好像没问题,但是如果动作后,脉冲输出的条件没有了,(你用了下延)导通一个扫描周期(你可以看一下扫描周期)来驱动;
问题来了,导通时间不足置位(这个你可以在监控状态看到),另外一个是和讲的一样,脉冲停止需要时间,(建议加入脉冲停止指令,这个是立即停止的)同一个指令多次使用(多线圈)就会有多种多样的问题。

三菱PLC控制伺服电机编程怎么弄
你还是把工作流程图画出来,这样大家才能帮你。不过估计不大可能编好了现成的程序给你的。
因为第一没有条件进行程序调试,这样的程序几乎%都是需要上机调试的。第二,你知道这种非标的4-5轴的程序,编程的市场价格是学生很难承受的。
否则,只好推荐你去看三菱PLC的编程手册了。根据里面的样例,你自己琢磨和实验,就可以了。
首先设置伺服电机驱动器的参数。
1.---控制模式选择,设定参数为0或是3或是4。3与4的区别在于当32(C-MODE)端子为短时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。如果您只要求位置控制的话,设定为0或是3或是4是一样的。
2.,,---增益与积分调整,在运行中根据伺服电机的运行情况相应调整.达到同服电机运行平稳。当然其他的参数也需要调整(,,,,也是很重要的多数),在您不太熟悉前只调整这三个参数也可以满足基本的要求.
3.---指令脉冲输入选择,默认为光耦输入(设为0)即可。也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。
4.,---简单地说就是控制伺服电机运转方向。设为0时,设为3,则5(SIGN1),6(SIGN2)导通时为正方向(CCW),反之为反方向(CW)。设为1时,设为3,则5(SIGN1),
6.(SIGN2)断开时为正方向(CCW),反之为反方向(CW),正、反方向是相对的,看您如何定义了,正确的说法应该为ccw,CW
5.、、---电子齿轮比设定。此为重要参数,其作用就是控制电机的运转速度与控制器发送一个脉冲时电机的行走长度。
伺服电机(servomotor)是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。

电话号码:18018737509
传真:0755-2101 7659
邮箱:527843680@QQ.COM
深圳市龙华区观湖街道观城社区环观南路105-13号201-203
18018737509
服务热线


